Robot simulator
La instal·lació de proves d'una fàbrica de robots necessita un programa per verificar els moviments del robot.
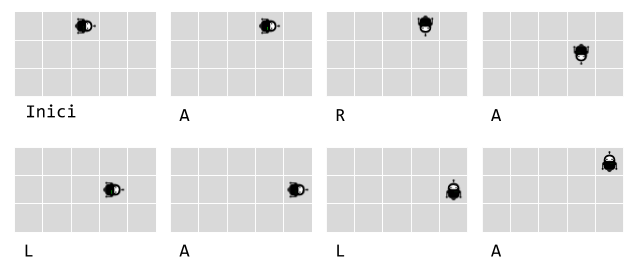
Els robots tenen tres possibles moviments:
- gir a la dreta (R)
- gir a l'esquerra (L)
- avançar (A)
Els robots es col loquen en una xarxa hipotètica infinita, orientats cap
a una direcció particular {N,S,E,W} en unes coordenades {X,Y}.
Aleshores el robot rep diverses instruccions, moment en què la instal·lació de proves verifica la nova posició del robot i en quina direcció apunta.
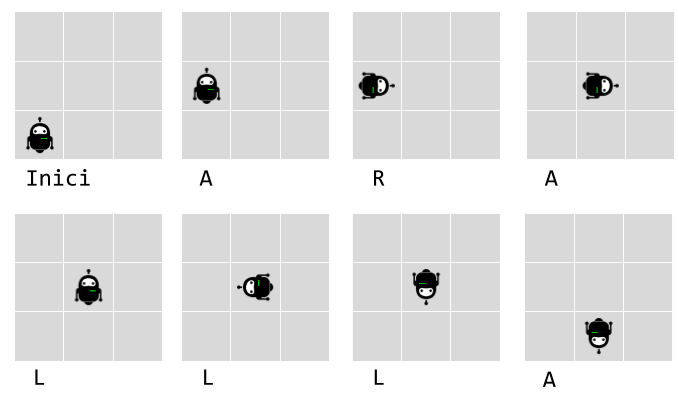
Per exemple, la cadena de lletres ARALLLA significa:
- Avançar (A)
- Gir a la dreta (R)
- Avançar (A)
- Gir a l'esquerra x3 (LLL)
- Avançar (A)
Digueu que un robot comença a {0,0} mirant al nord. A continuació,
executar aquest flux d'instruccions hauria de deixar-lo a {1,0} mirant
al sud.
Input Format
La entrada consisteix en:
Dos nombres {X,Y} indicant les coordenades de la posició inicial.
Un caràcter O indicant la orientació inicial.
Una cadena de L caràcters amb les instruccions
Constraints
-100 <= X <= 100
-100 <= Y <= 100
O = {N, S, E, W}
1 <= L <= 100Output Format
S'imprimiran les coordenades finals {X,Y} i la orientació en que queda el
robot
Sample Input 1
0 0
N
AARARALSample Output 1
{1, 1}
EExplanation 1
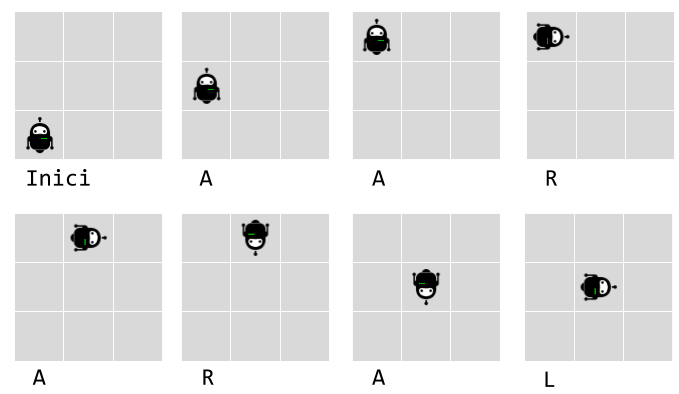
Sample Input 2
0 0
N
RALAARASample Output 2
{2, 2}
EExplanation 2
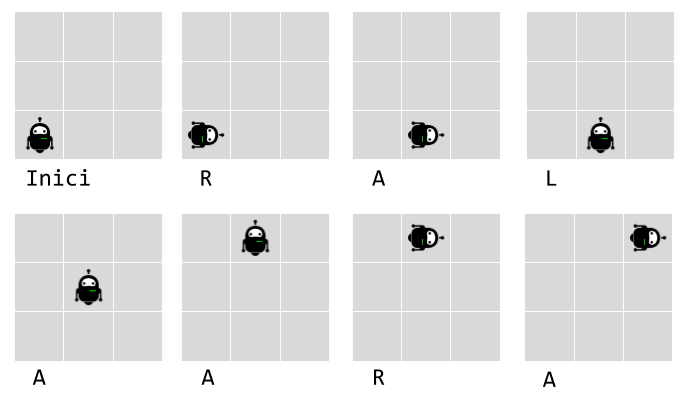
Sample Input 3
2 2
E
ARALALASample Output 3
{4, 2}
NExplanation 3
Sample Input 4
3 1
E
LARLAARSample Output 4
{3, 4}
ESample Input 5
-1 -2
S
AAASample Output 5
{-1, -5}
SSample Input 6
17 -3
E
AAALAAASample Output 6
{20, 0}
NSample Input 7
20 10
W
ALARLARLARRARRRSample Output 7
{19, 8}
WCC BY-NC-SA 4.0